The basics of my reacTIVision patch is taken from what I built in the fourth week of lectures at the university (see Fig.2.1.).

The reacTIVision framework works via a stand alone application which uses a real time video stream too quickly and robustly tracks fiducial markers, transmitting the markers states via a local network, providing data which can be interpreted by the TUIO client (Kaltenbrunner and Bencina, 2005) (Fig.2.2.).

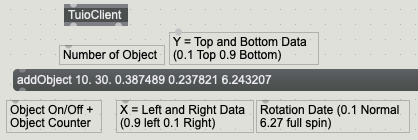
Fiducial markers are placed on a translucent table top and beneath the table a camera captures images. These images are processed and determine the identity, orientation and location of individual fiducial markers (Bencina and Kaltenbrunner, 2005). The data that is captured is translated into floating point number data (see Fig2.3.). This floating point data is what I can use to control other object parameters within Max.
References.
Bencina, R., and Kaltenbrunner, M., 2005. The Design and Evolution of Fiducials for the reacTIVision System. [pdf] Barcelona: Audiovisual Institute Universitat Pompeu Fabra. Available at: https://modin.yuri.at/publications/reactivision_3rditeration2005.pdf[16/04/2019].
Kaltenbrunner, M., and Bencina, R., 2005. reacTIVision: A Computer-Vision Framework for Table-Based Tangible Interaction. [pdf] Barcelona: Audiovisual Institute Universitat Pompeu Fabra. Available at: https://modin.yuri.at/publications/reactivision_tei2007.pdf [16/04/2019].
